
目录
快速导航-
电子与信息器件 | 结合YOLOv8与双目测距算法的水面漂浮垃圾检测定位系统设计
电子与信息器件 | 结合YOLOv8与双目测距算法的水面漂浮垃圾检测定位系统设计
-
电子与信息器件 | 改进的广义二阶积分器的高频脉振方波电压注入PMSM无传感器控制
电子与信息器件 | 改进的广义二阶积分器的高频脉振方波电压注入PMSM无传感器控制
-
电子与信息器件 | 永磁同步电机矢量控制专用集成电路的设计
电子与信息器件 | 永磁同步电机矢量控制专用集成电路的设计
-
电子与信息器件 | 应用超声与物联网云计算技术的用水安全研究
电子与信息器件 | 应用超声与物联网云计算技术的用水安全研究
-
电子与信息器件 | 全国产化微弱信号调理电路
电子与信息器件 | 全国产化微弱信号调理电路
-
电子与信息器件 | 基于锁定放大技术的真空度检测系统
电子与信息器件 | 基于锁定放大技术的真空度检测系统
-
电子与信息器件 | 基于I/Q数据采集的便携式无线电检测终端
电子与信息器件 | 基于I/Q数据采集的便携式无线电检测终端
-

能源技术 | 基于主从博弈的多微网共享储能优化调度研究
能源技术 | 基于主从博弈的多微网共享储能优化调度研究
-
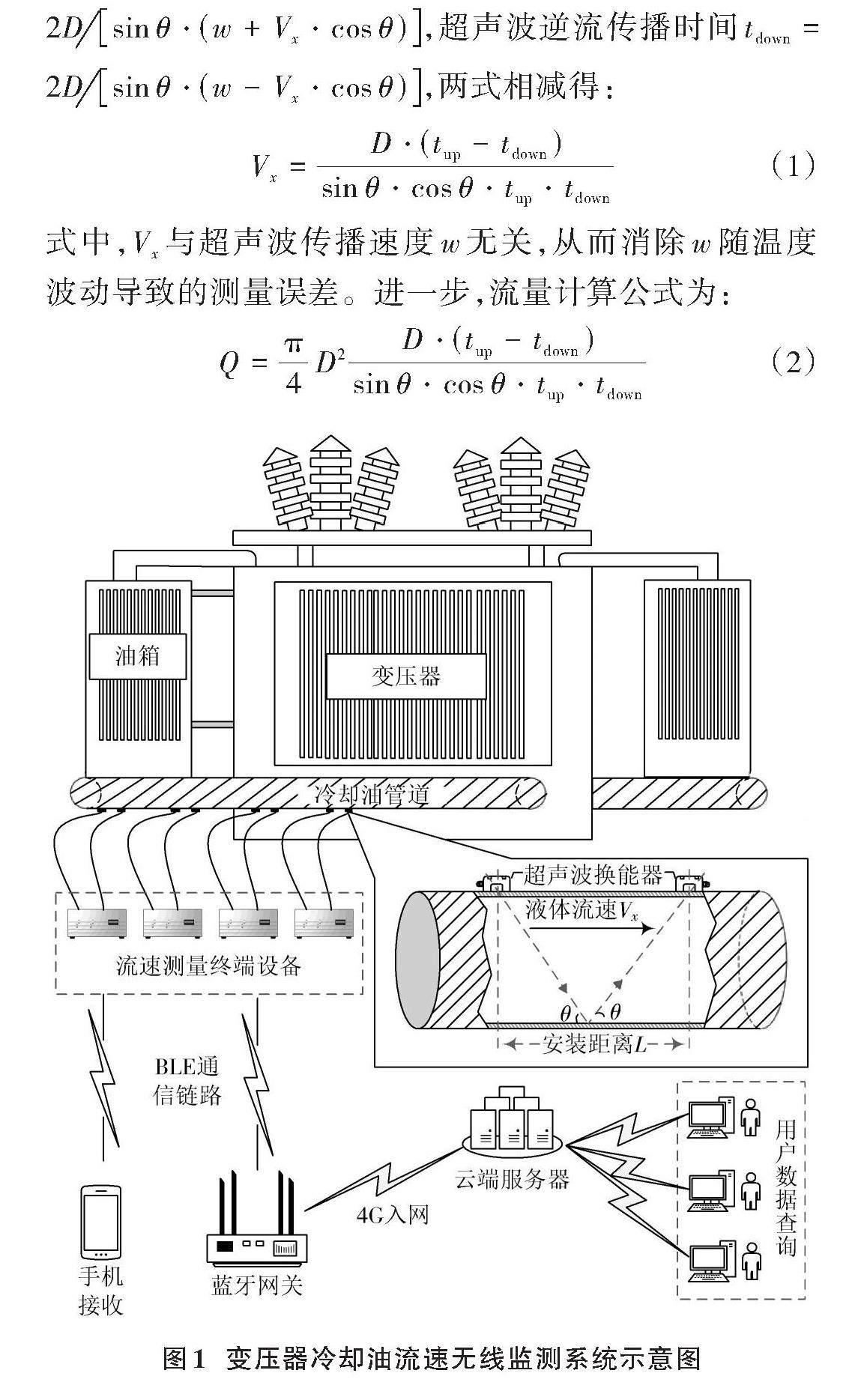
能源技术 | 基于超声波时差法的变电站变压器冷却油流速测量
能源技术 | 基于超声波时差法的变电站变压器冷却油流速测量
-
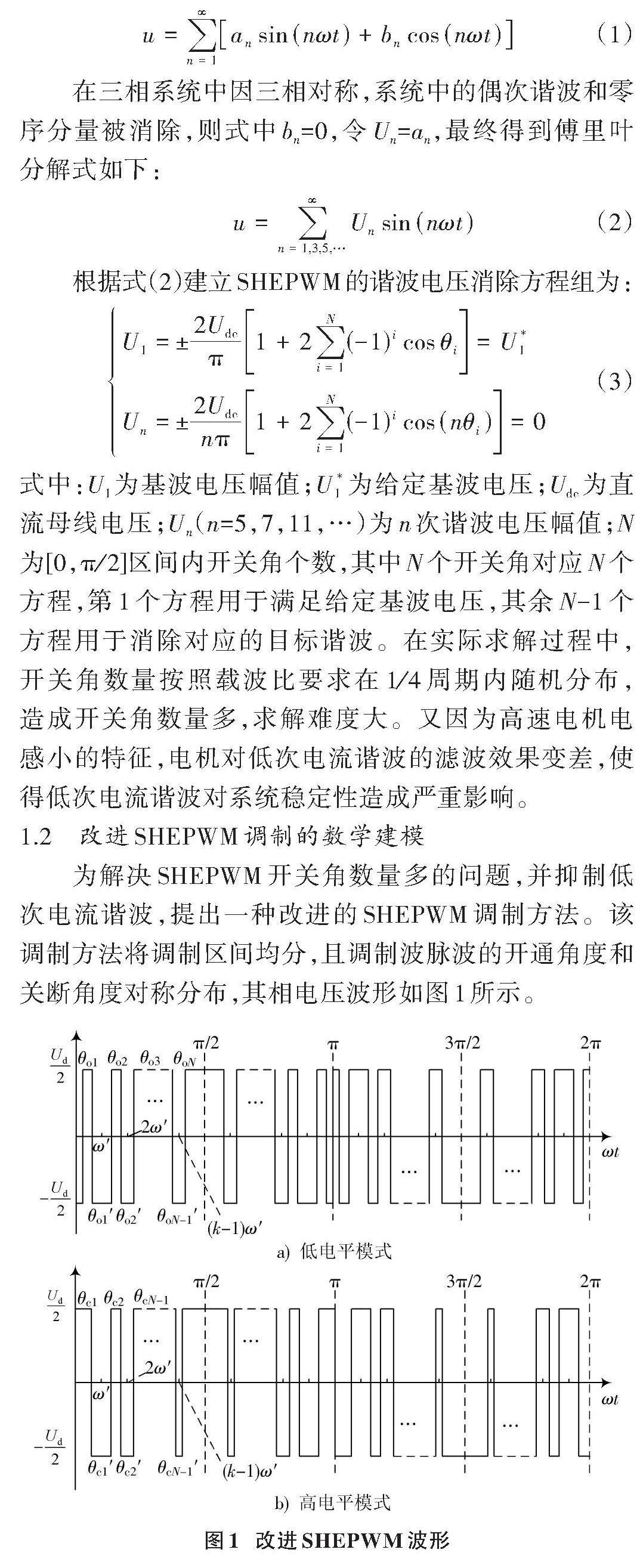
能源技术 | 一种抑制高速电机低次电流谐波的调制方法
能源技术 | 一种抑制高速电机低次电流谐波的调制方法
-
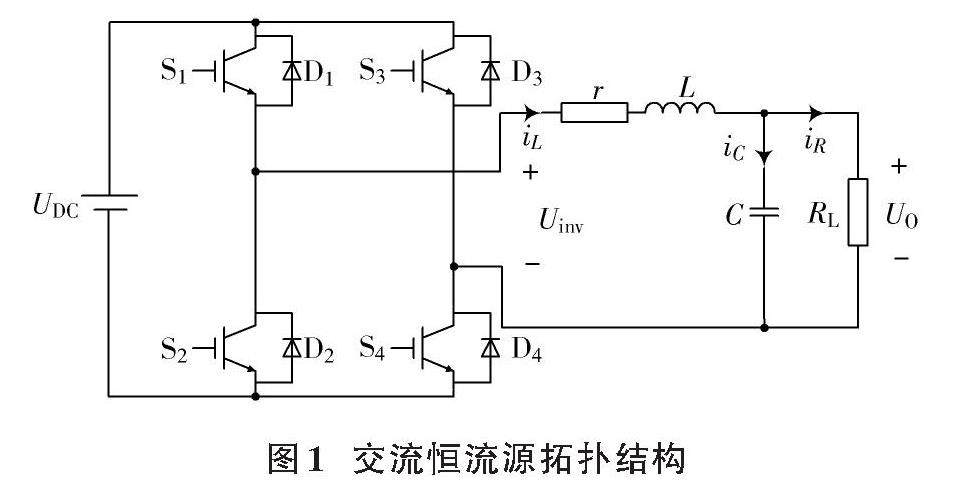
能源技术 | 管道电流测绘交流恒流源双环控制策略研究
能源技术 | 管道电流测绘交流恒流源双环控制策略研究
-
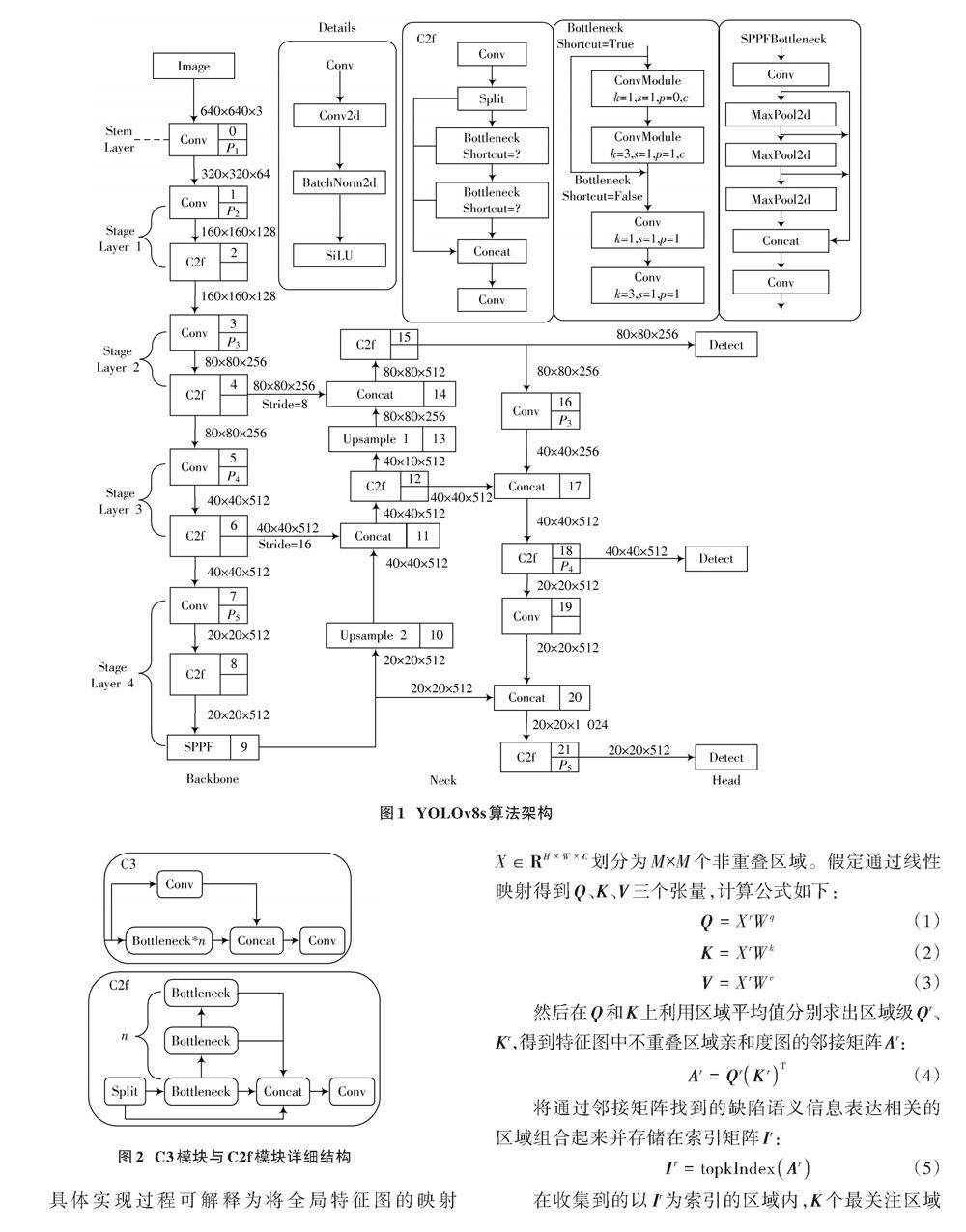
能源技术 | 基于YOLOv8s的轻量级绝缘子多缺陷检测模型
能源技术 | 基于YOLOv8s的轻量级绝缘子多缺陷检测模型
-
能源技术 | 一种基于MPPT多级扰动的孤岛检测方法
能源技术 | 一种基于MPPT多级扰动的孤岛检测方法
-
计算机科学与应用 | 基于双分支分割网络的复杂环境车道线检测方法
计算机科学与应用 | 基于双分支分割网络的复杂环境车道线检测方法
-

计算机科学与应用 | 基于神经网络和注意力机制的协同过滤推荐算法的研究
计算机科学与应用 | 基于神经网络和注意力机制的协同过滤推荐算法的研究
-
计算机科学与应用 | 面向可解释性的软件缺陷预测主动学习方法
计算机科学与应用 | 面向可解释性的软件缺陷预测主动学习方法
-
计算机科学与应用 | 改进YOLOv5的布匹缺陷检测方法
计算机科学与应用 | 改进YOLOv5的布匹缺陷检测方法
-
计算机科学与应用 | 基于改进神经网络的视频序列运动目标识别方法
计算机科学与应用 | 基于改进神经网络的视频序列运动目标识别方法
-
航空航天航海技术 | 基于无人机的交通事故严重程度检测
航空航天航海技术 | 基于无人机的交通事故严重程度检测
-
航空航天航海技术 | 基于1DCNN⁃BiLSTM的航空发动机故障分类研究
航空航天航海技术 | 基于1DCNN⁃BiLSTM的航空发动机故障分类研究
-
航空航天航海技术 | 基于有限元与改进SVM的飞行器结构无损检测模型设计
航空航天航海技术 | 基于有限元与改进SVM的飞行器结构无损检测模型设计
-
前沿交叉科学 | 改进YOLOv8算法的交通标志小目标检测
前沿交叉科学 | 改进YOLOv8算法的交通标志小目标检测
-
前沿交叉科学 | 几何约束下虚拟人脸重复视觉特征点匹配研究
前沿交叉科学 | 几何约束下虚拟人脸重复视觉特征点匹配研究
-

前沿交叉科学 | 基于DF⁃Track的水下鱼体跟踪方法
前沿交叉科学 | 基于DF⁃Track的水下鱼体跟踪方法
-
前沿交叉科学 | 基于无线组网技术的花园智能生态管理系统的研究
前沿交叉科学 | 基于无线组网技术的花园智能生态管理系统的研究
-
人工智能 | 非线性Thau观测下的水下机器人定速推进故障识别
人工智能 | 非线性Thau观测下的水下机器人定速推进故障识别
-
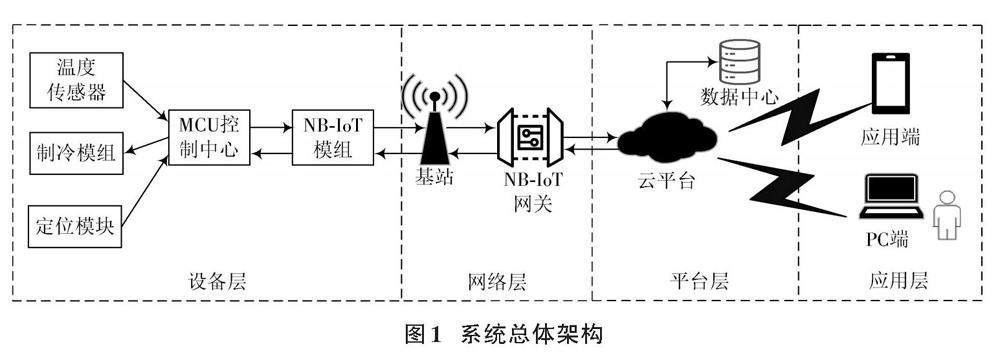
人工智能 | 基于串级模糊PID控制的NB⁃IoT智能保温箱
人工智能 | 基于串级模糊PID控制的NB⁃IoT智能保温箱
-
人工智能 | 改进A*和DWA的机器人路径规划研究
人工智能 | 改进A*和DWA的机器人路径规划研究
过往期刊
更多-

现代电子技术
2024年22期 -

现代电子技术
2024年21期 -

现代电子技术
2024年20期 -

现代电子技术
2024年19期 -

现代电子技术
2024年18期 -

现代电子技术
2024年17期 -

现代电子技术
2024年16期 -

现代电子技术
2024年15期 -

现代电子技术
2024年14期 -

现代电子技术
2024年13期 -

现代电子技术
2024年12期 -

现代电子技术
2024年11期 -

现代电子技术
2024年10期 -

现代电子技术
2024年09期 -

现代电子技术
2024年08期 -

现代电子技术
2024年07期 -

现代电子技术
2024年06期 -

现代电子技术
2024年05期 -

现代电子技术
2024年04期 -

现代电子技术
2024年03期 -

现代电子技术
2024年02期 -

现代电子技术
2024年01期






 登录
登录